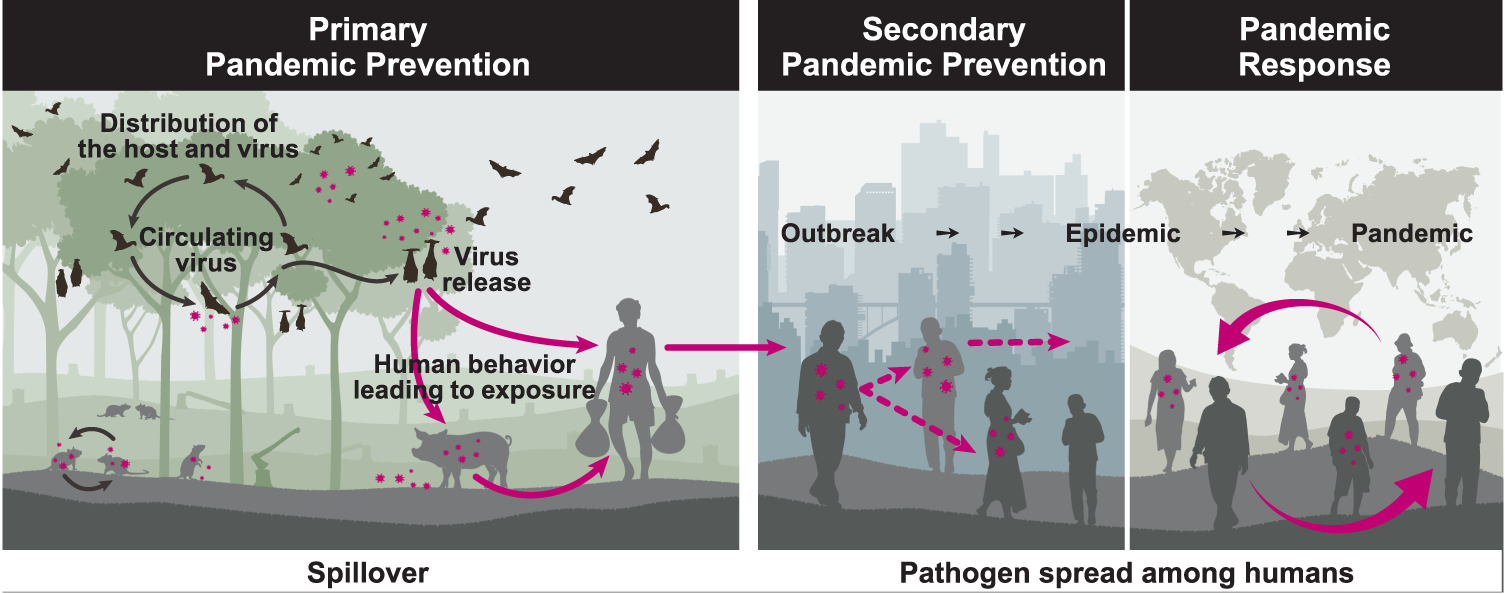
Abstract Substantial global attention is focused on how to reduce the risk of future pandemics. Reducing this risk requires investment in prevention, preparedness, and response.
Gary M. is a Film Critic at various prominent publications. He focuses on themes related to LGBTQ issues, social commentary, and healthcare, often intertwining these topics with his reviews and insights on real estate and Pennsylvania. Gary's work has been featured in outlets such as Nature Portfolio, Salon Media Group, and The Philadelphia Gay News, among others.